Sajid Nisar
Associate Professor, Ph.D. in Engineering
- sajid.nisar

- Areas of Research
- Medical Robotics, AI-powered Human-Machine Systems, Haptics, Soft Manipulators & Actuators
- Profile
- Research
-
Dr. Sajid Nisar earned his M.Sc. and Ph.D. in Mechanical Engineering & Science with majors in Robotics from Kyoto University. His research interests include development of robots for surgery, innovative mechanism design, haptics for medical and mobility-applications, and soft manipulator design.
Previously, Dr. Nisar was a visiting scholar at Stanford University’s Center for Design Research. He also served as team lead in a nationally-funded project on realization of a surgical robotic trainer and simulator and senior mechanical engineer at the National University of Sciences & Technology, Islamabad. He received Japan’s JSPS Fellowship for Young Scientists, and Kyoto University’s GSS Fellowship for global survivability studies. He was awarded with IEEE Robotics and Automation Society Japan Chapter’s Young Award 2019 for his research published at the International Conference on Robotics and Automation (ICRA’19). With numerous other distinctions and achievements in his career, he also holds the Engineering Dean’s Award 2018 from Kyoto University.
Outside of academia, Dr. Nisar enjoys spending time with his adorable kids and family.
-
Robots with Medical Applications Both Far and Near
Without a doubt, robotics has been one of the most exciting fields in recent memory, with applications from deep-sea exploration to probing in outer space – and everything in between. One of the youngest members of KUAS’ esteemed faculty, Dr. Nisar has made robotics in general and robot design specifically one of the focal points of his research. he believes that robots have applications wherever humans do. He has been focusing his research on robotics for healthcare, specifically in the robot-assisted surgery.
Dr. Nisar’s story is one with close ties to his personal roots: one of his earliest research projects was in his native Pakistan, where he developed a remotely operated surgical robot for training of surgeons. Since there is a dearth of professional surgeons in the country’s rural areas, robotics can help cover the gap. A surgeon can thus be in a central area and operate remotely using the robots. While being in Japan, he remains committed to improving this technology even further. There exist two main challenges: fast communication infrastructure, specifically the need to transmit information between surgeon and robot without any time delay, and the design of the robot itself. It is the latter that falls within Dr. Nisar’s field of expertise.
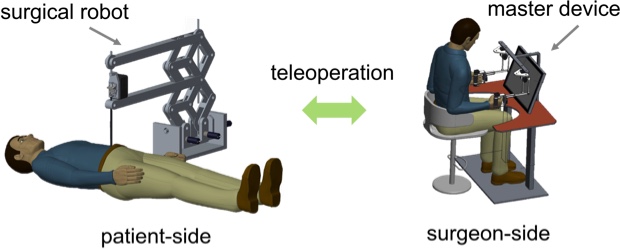
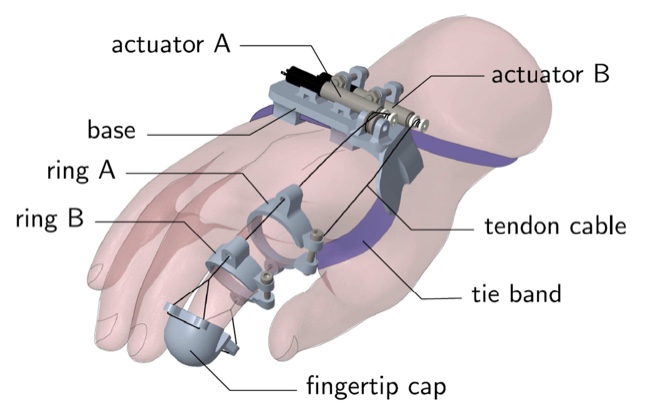
When it comes to design, one of the pressing issues is addressing the absence of sense of touch between the surgeon and the patient. When the surgeons control robots remotely, they cannot feel the forces of interaction between the robot and its environment. This absence of the sense of touch (called haptic feedback) is known to decrease the operator’s performance while operating the robot. To address this problem, Dr. Nisar has developed, in collaboration with researchers from Stanford University, USA, three different wearable haptic devices that provide the human operator with a sense of robotic touch on their fingertips. He investigated the effects of different device designs and demonstrated experimentally that operator performance increases significantly more for some specific design choices compared to others. The technology they developed has the potential to improve performance in various teleoperated robotic applications, notably in robot-assisted surgery by making it safer and easier to perform. The point is to bring the surgeon and patient closer, making the surgery itself more reliable and intuitive.
Secondly, there exist issues in the design of the surgical robots on the hardware-level, as majority of the existing robotic arms have been built with industrial applications in mind. Adapting them thus increases cost and leads to shorter life and poor performance. Dr. Nisar is actively working towards building a specialized surgical robot to mitigate these issues. This would not only have cost and performance benefits, but also has real healthcare merits. Such a robot design would be intrinsically safer and does not need to rely on algorithms, which leave room for error. In other words, such robots would guarantee safety on a hardware-level, instead of doing so on a software level.
Dr. Nisar has already been acknowledged in the academic community. He has recently been awarded the IEEE Young Award 2019 by IEEE Robotics and Automation Society’s Japan Joint Chapter for his work presented at the IEEE International Conference on Robotics and Automation (ICRA) 2019. A team lead by him has also been awarded with the Best Innovation Award at the IEEE World Haptics Conference 2019. He has also been selected for the Interstellar Initiative 2019–20, jointly organized by the Japan Agency for Medical Research and Development (AMED) and the New York Academy of Sciences, to develop a solution to a major research question. But he is far from finished. One of his major life goals is to create the first commercial surgical robot in Japan, and one that is cost-effective and portable enough to be used anywhere. He wants to solve real-world problems through scientific solutions and continues his research at KUAS to that end.